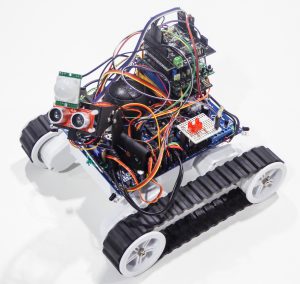
The R5 Robot is a low cost maker robot built from standard parts available online. It was built with a budget of around £500 GBP. It is a tracked robot and has a head with two degrees of freedom. There is closed loop odometry (measurement of motor rotation), infra-red proximity sensors, a passive IR detector to assist in the detection of humans, and an ultrasonic range finder mounted on the head. R5 also has text to speech capabilities with a local loudspeaker and blue-tooth output. The four red LEDs visible in the photo are also driven by the audio output.
The original concept was to design a small low cost robot that would roam autonomously, and be able to accept simple voice commands, access information via the internet and pursue both pre-defined, and user directed/prioritised goals.
R5 has served as a test platform for the Instinct Planner, and has been used in several robot ethics experiments related to transparency, see Research. Short videos of the robot in operation are available on YouTube as below:
This short video was used as part of an online experiment to investigate machine transparency, March 2016.
The video shown below was taken at the AtBristol Science Centre, Bristol, UK, in December 2016.
Source Code
This technology is available in GitHub as an open source project. The repository contains all the code required for the R5 robot, together with details of the components used and the wiring. With this information it is hoped others will either build their own R5, or build other robots based on this design.
Help System
The R5 Robot includes an online command line help system. Typing HELP shows a list of all available commands
HELP PLAN STOP START RESET DUMP TIME SETTIME REPORT RATE CAL CON PELEM RSENSE RACTION HSTOP HSTART SPLAN RPLAN SCONF RCONF SWIFI CONF HELP VER SHOWIFI SHOCONF SHOREPORT SHORATE SHONAMES SPEAKRULE SHORULES SRULES RRULES CNAMES
Typing HELP [command] displays details for that command, for example:
HELP SPLAN SPLAN - save robot plan in EEPROM HELP RPLAN RPLAN - read robot plan from EEPROM
Also see the Instinct Planner HELP system for details of the planner commands.