Earlier this month I attended one of the regular BRLSI philosophy talks. Andreas Wasmuht prepared an excellent introduction to the work of Martin Heidegger, specifically his work Being and Time (first published in 1927). This post is not specifically about that work, but it got me thinking again about how much more … Continue Reading ››
Category Archives: Autonomous Robotics

IET Responsible AI Webinar
Delighted to be part of the programme @IETevents new webinar series on Responsible AI, exploring cutting-edge technology and future applications over seven sessions in November and December. Booking is open now: http://ow.ly/Kcdg30rWpTu

Highlights for Academic Year 2020/21

New Book: Transparency for Robots and Autonomous Systems

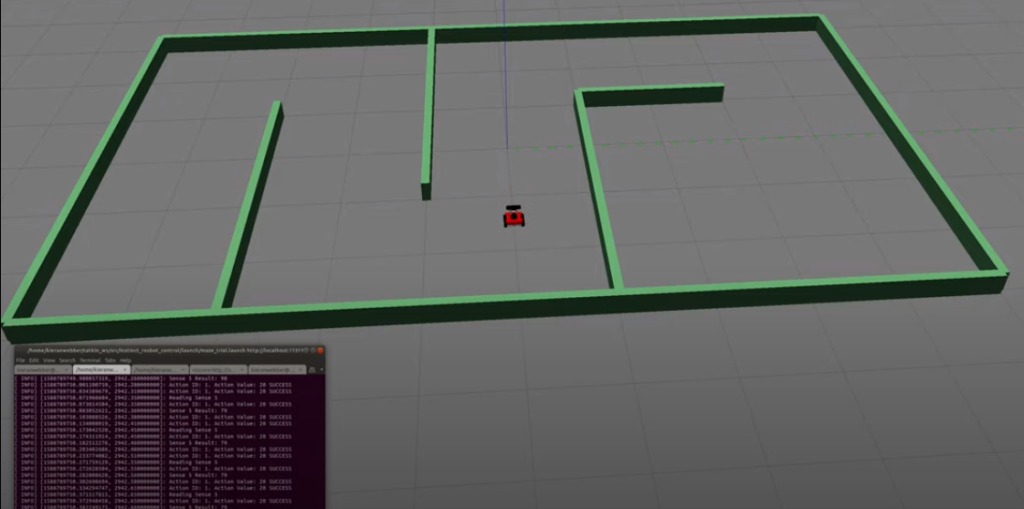
ROS-Instinct: A new reactive planner for the Robot Operating System (ROS)


Battle of Ideas 2019 – Can you build a human?
 I was delighted to be part of the panel for 'From Robots to AI: Can You Build a Human?' at the Barbican Centre in London a couple of weeks ago. Chaired by Timandra Harkness, along with … Continue Reading ››
I was delighted to be part of the panel for 'From Robots to AI: Can You Build a Human?' at the Barbican Centre in London a couple of weeks ago. Chaired by Timandra Harkness, along with … Continue Reading ››
Reactive Planning for Robotics and Agent Based Models
This page has been created for the AISB Tutorial/Hackathon event, part of AISB2017 at the University of Bath, but may be used by anyone wanting to get practical hands-on experience with reactive planning for robot control.
Before reading this page, please read the Instinct Planner page for background information on reactive planning in … Continue Reading ››
Evolution – The key to understanding Humans and Robots
This week I am primarily focused on preparing my talk for the TEDx event in Frome on 28th January. I am giving a talk about how humans interact with robots, and why it is important that we design our robots to be understandable and transparent, rather than mysterious and deceptive.
However, as I started … Continue Reading ››
Robot Encounter and Transparency
Over the last year or so, one of my main research interests has been machine transparency. We've been using the R5 Robot in various 'robot encounter' experiments, both online using video recordings and in a live environment. We've shown that people do not naturally form good mental models of robots on first encounter. They … Continue Reading ››
Thoughts on Robot Planning
I've just spent a couple of days at the ICAPS PlanRob workshop. About 35 of us met together at King's College in London, and my paper on the Instinct Planner was one of 23 accepted papers.
Manuela Veloso gave the keynote talk. She talked about CoBots (robots that must cooperate with … Continue Reading ››