

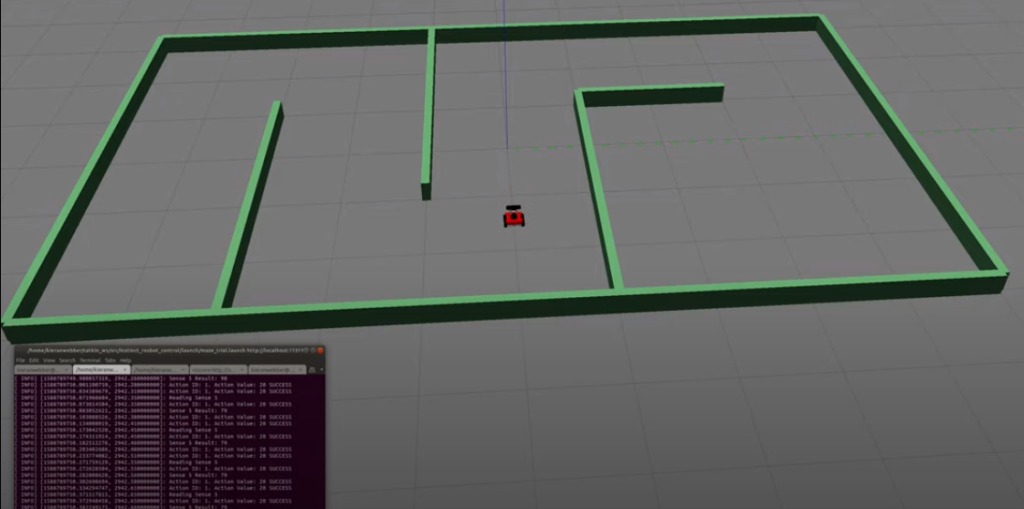
This year I've been developing a project with a final year undergraduate in Computer Science at Bath, integrating the Instinct Reactive Planner with the Robot Operating System (ROS). The project has gone really well, resulting a flexible and powerful framework to enable the integration of ROS based robots with Instinct. The target platform used for the project is the Husarion ROSbot (shown). There is also a short video. For further details please contact me.